Architecture is often concerned with creating immovable spaces. But what if environments could shift with our moods? Click To TweetEver since the first human stacked one brick onto another, architecture has been concerned with creating immovable things. Even with the rise of smart interconnected environments – where lights, heating, doors, and other systems within a building all work together – the physical structures of our buildings remain the same. As a result, the movements and interactions of people within these spaces are shaped by the buildings themselves, like water flowing through a canyon.
This is why architecture and urban design are about more than simply ensuring that our buildings are safe and efficient. Or that they are merely beautiful. Buildings can inspire or isolate, connect or divide, so that debates about everything from the nature of community to the fate of doorknobs have radical social implications. How we live and work every day cuts to the core of what makes us human. But what if buildings could respond to our movements and gestures? What would that change?
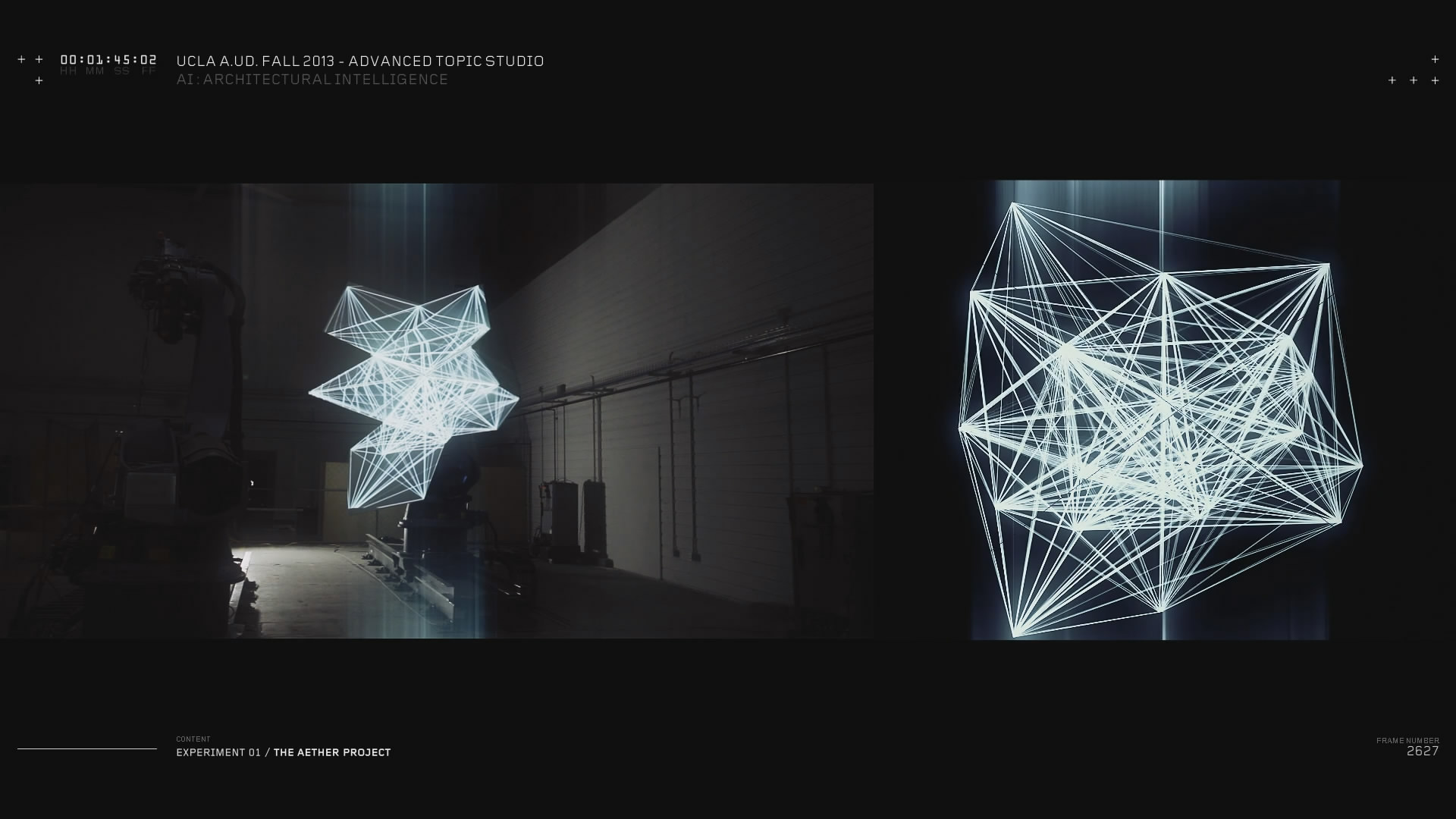
Inside the Aether Project
Technology is the story of how humans have embedded mind into matter. Architecture is no exception. Click To TweetTechnology is the story of how humans have embedded mind into matter. Architecture is no exception.These were the questions asked by a team of students at the UCLA Department of Architecture and Urban Design. Refik Anadol, Raman Mustafa, Julietta Gil, and Farzad Mirshafiei wanted to explore how architecture itself could become smart and responsive. Technology, they say, is the story of how humans have embedded mind into matter – and architecture is no exception.
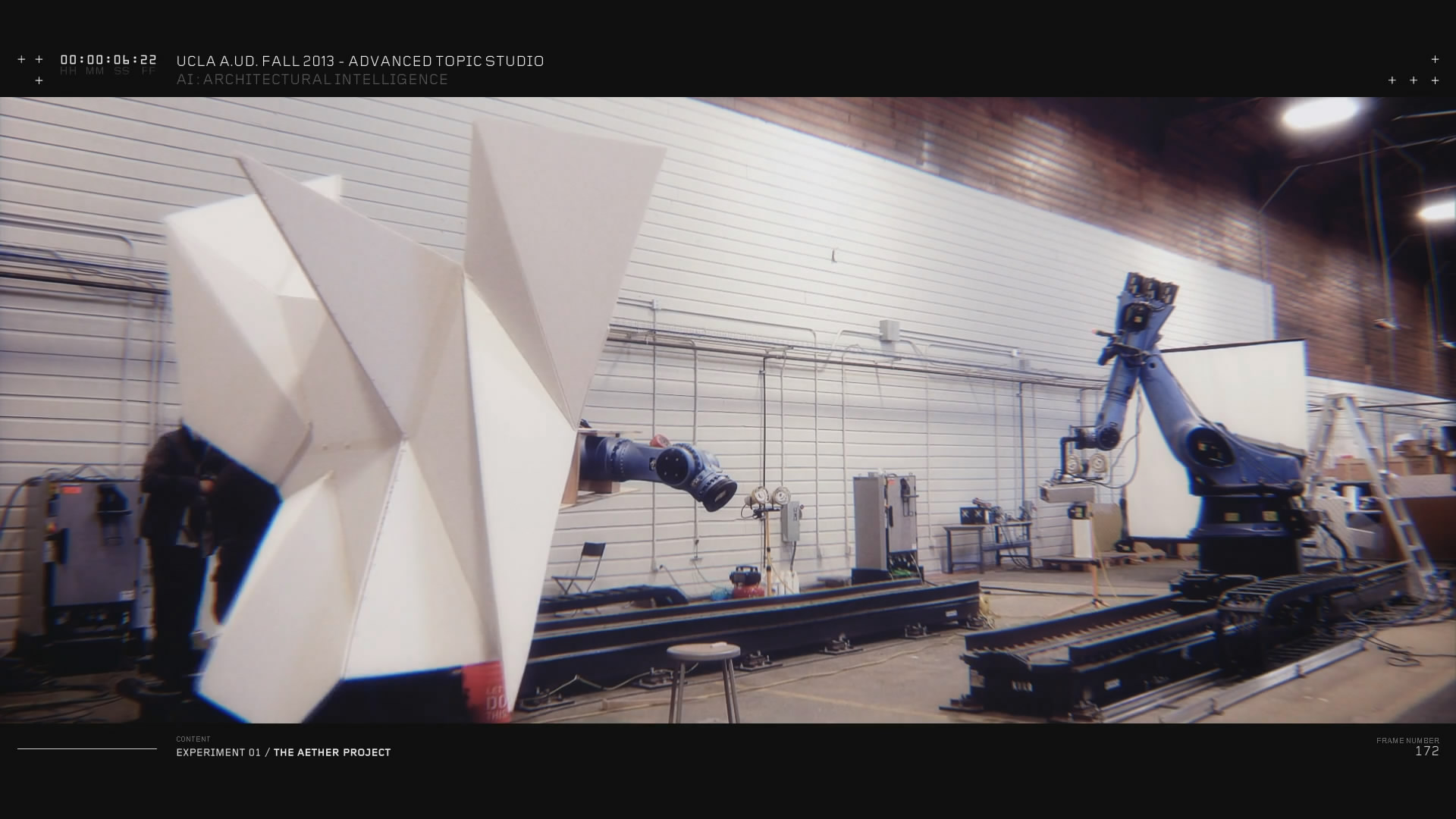
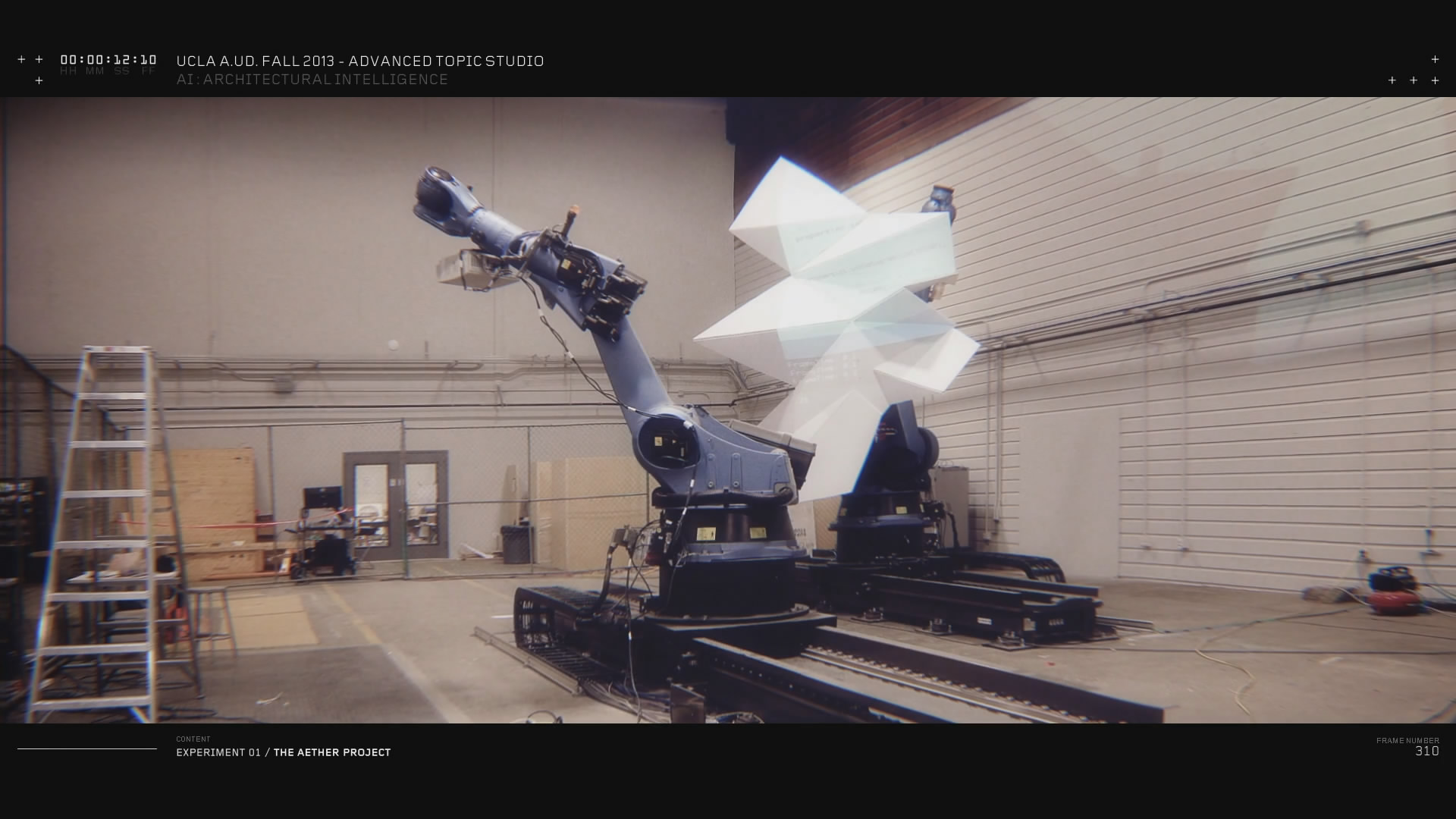
Using KUKA KR150-2 robots, projection mapping, and motion control, the Aether team created “an immersive interactive environment that gives a glimpse into the near future of artificial intelligence and its effects on human existence in an environment that bridges the physical and the digital.”
Interaction as design medium
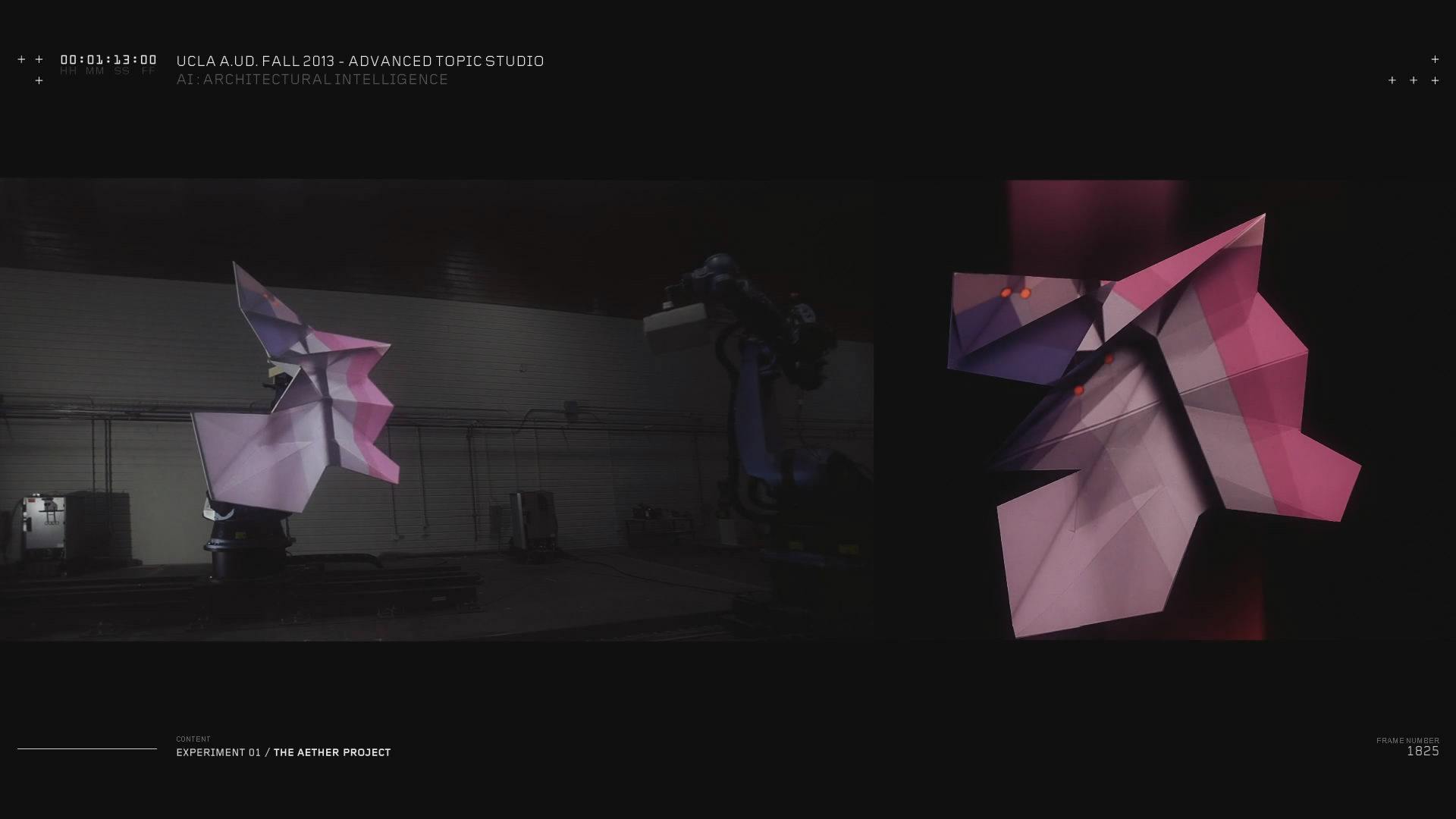
Aether begins with Leap Motion interaction. The movements of your hand have the power to transform a robot-controlled surface geometry. At the same time, another robot projects elaborate designs that are synchronized with the physical geometry, creating a choreographed robotic dance. The patterns that course along the surface are constantly shifting. Geometry, depth, shadow, and color – all rise and fall as the pattern changes.
What does this have to do with architecture? With the growing use of robots and smart hardware, architects will have a lot more freedom in how they design the world around us. The Aether Project shows how a physical structure can be transformed through interaction, and takes it a step further by creating designs that can be layered on top of that structure. Interaction becomes a physical design medium, just like it already has for the digital world.

Q&A with the Aether team
What inspired you to create The Aether Project?
Aether gives a glimpse into the near future of artificial intelligence and its effects on human existence.We were interested in the recursive effect between an intuitively intelligent observer and environments that exhibited ephemeral qualities (such as consciousness) through artificial intelligence. The Aether Project explores the potential of architecture as spatial technology which undergoes variable iterations that respond to inhabitants. The end result is an immersive interactive environment that gives a glimpse into the near future of artificial intelligence and its effects on human existence in an environment that bridges the physical and the digital, and question the limits of transposition of intention and intuition across different media.
What were some of the ideas behind its creation?
The evolution of technology reveals an aspiration to place mind into matter in order to create tools that are subservient yet autonomous from humans. Architecture as a form of technology does not exist outside of this cultural aspiration.
The Aether Project is an experiment that, through sensing technology, express this desire to evolve architecture into an intelligent form of technology that can autonomously negotiate between the human body, human psyche, the environment, and other physical and perceptual parameters. In turn, the project creates a matrix of conceptual questions regarding the existential nature and limits of consciousness – both for the machine and as extension to that currently experienced by humans.
How did you design the interaction model?
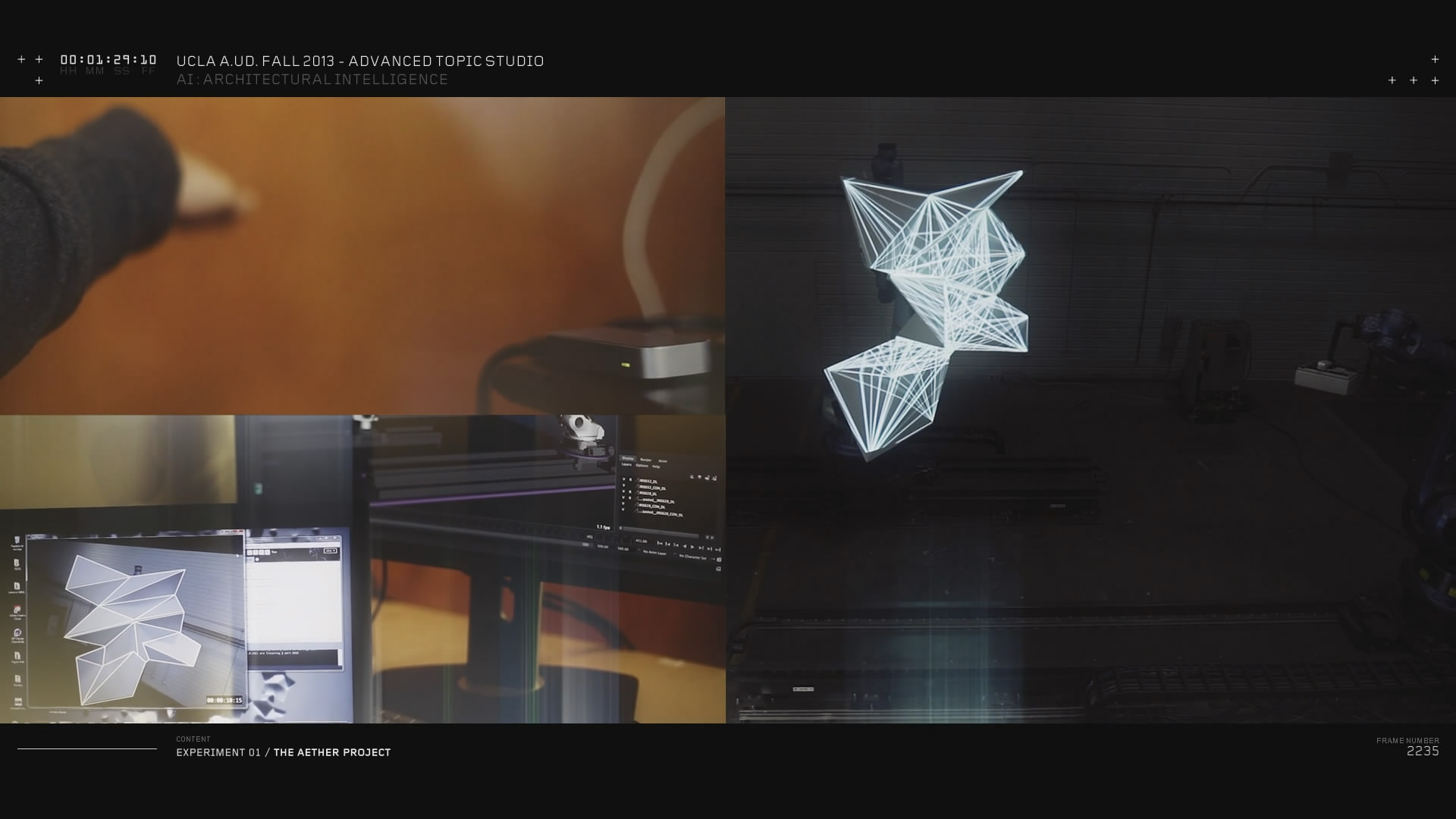
The Aether Project is designed to test the interaction between human and robot, robot and robot, and the resulting recursive relationship between technology and human perception continuously. The immersive experience that we achieved with the Leap Motion Controller was essential in creating the real-time environment. It allowed for the synchronous alignment of projection-mapped visuals on a transforming surface geometry, both choreographed though robot movements.
How do the different parts of the installation work together?
The system appears conscious of its inhabitant by taking human inputs (hand gestures) and translating them into real-time formal deformation through choreographed robot movement. Concurrently, this affects the projection mapping, as the system recalculates the resultant surfaces onto which it must accurately project.
This technical feat was achieved through two machines working simultaneously to parse motion data, while another machine matched previously parsed keyframes with graphics. The synchronous projection – consisting of graphics that enhance and suppress notions such as geometry, depth, shadow and color – thus creates a multiplicity of transforming perceptions.
What does Leap Motion interaction mean for art, engineering, and architecture?
The Leap Motion Controller’s flexibility and accuracy was responsible for the interaction across the environment, and was the key to the foundation of the conceptual platform – abstract human gesture into the physical and ephemeral transformation of space though robots. As the project produces a synchronous relationship between the robots and humans, it blurs the boundary between the robotic system and the human participant.
Whereas traditional architectural forms choreograph the static movement of inhabitants in space, in this cybernetic system the inhabitants are also a part of the system itself.The device allows for a responsive system to explore the role which humans serve in this apparent intelligence, along with how the space and ambience created through their combination would in turn affect humans in a continuous feedback loop. Whereas traditional architectural forms choreograph the static movement of inhabitants in space, in this cybernetic system the inhabitants are also a part of the system itself, proposing a potential for an active form of architecture where behavior takes precedent over form and interaction becomes the new design medium.
An earlier version of this post incorrectly identified the robots as KUKA TITAN models.
[…] Q&A: Robot Choreography and the Smart Future of Responsive Architecture | Leap Motion Developer …. […]
March 5, 2014 at 5:58 am[…] Ever since the first human stacked one brick onto another, architecture has been concerned with creating immovable things. Even with the rise of smart interconnected environments – where lights, heating, doors, and other … […]
March 10, 2014 at 12:26 am[…] Ever since the first human stacked one brick onto another, architecture has been concerned with creating immovable things. Even with the rise of smart interconnected environments – where lights, heating, doors, and other systems within a building all work together – the physical structures of our buildings remain the same. As a result, the movements and interactions of people within these spaces are shaped by the buildings themselves, like water flowing through a canyon.This is why architecture and urban design are about more than simply ensuring that our buildings are safe and efficient. Or that they are merely beautiful. Buildings can inspire or isolate, connect or divide, so that debates about everything from thenature of community to the fate of doorknobs have radical social implications. How we live and work every day cuts to the core of what makes us human. But what if buildings could respond to our movements and gestures? What would that change? […]
March 10, 2014 at 2:20 am[…] […]
March 16, 2014 at 5:41 am[…] This week on Developer Labs, dive into the future of architecture with the creators of the Aether Project. Plus, highlights from last month’s Leap Motion hackathon and a new Japanese language feature in […]
March 16, 2014 at 6:52 pm[…] exist. While traditional art relies on physically designed objects, newer experiments like The Aether Project focus on how interaction design can also be a form of artistic […]
March 18, 2014 at 6:13 am[…] might factor into the blueprints of the future. Check out the extended version of this post on our developer blog, including a Q&A with the creators. (For more interactive art with big ideas, you might want […]
April 7, 2014 at 4:20 pm[…] height to convert XYZ to RGB colors, transformed virtual environments with hand speed, and even controlled giant industrial robots. If you’re looking for a little inspiration, check out our blog’s Art & Design and UX […]
July 8, 2014 at 7:48 am